


Radar QPE w/ Gauge Bias Correction - Warning Decision Training Division (WDTD)
Navigation Links
Products Guide
Radar QPE w/ Gauge Bias Correction
Short Description
The Radar QPE w/ Gauge Bias Correction applies a bias correction to the QPE – Radar Only product. Additionally, it incorporates the Gauge Quality Control algorithm before the accumulations are completed. As of Version 12, it is used as an input to the Multi-Sensor QPE product.
Subproducts
- 1-, 3-, 6-, 12-, 24-, 48-, and 72-hour accumulations
Primary Users
NWS: WFO, RFC
Input Sources
1-hr QPE – Radar Only, HADS and MADIS gauge data
Resolution
Spatial resolution: 1km x 1km
Temporal resolution: Updated hourly at the top of the hour. All products end at the indicated time.
Product Creation
As of MRMS Version 12, this product is not supported as a standalone product, but rather, as an input to the Multi-Sensor QPE. Once Version 12 products are viewable on the SBN, you will only be able to access this product via the internal MRMS Development site.
The goal of the Radar QPE w/ Gauge Bias Correction product is to improve upon the QPE – Radar Only product by using surface-based observations (i.e. rain gauges) to bias correct the QPEs. The gauges pass through the Gauge Quality Control to rid of any gauges that may cause erroneous estimates due to factors such as frozen precipitation, untimeliness of reporting, and anomalously high/low values. At each remaining gauge, the difference between the co-located radar QPE and the gauge observation is found. This error is interpolated to surrounding radar estimates within a radius of influence.
The bias correction takes into account density of the gauge network, as well as distance from the gauge, in order to properly weight the radar estimate and the gauge observations at each grid point. Cross validation is then completed in order to make sure the interpolation is reasonable; if it is not, the process will throw out unreasonable gauges. The final bias grid is then subtracted from the original radar-estimated QPE field. The bias correction is only conducted on the one-hour radar accumulation estimate, since all the other accumulations are aggregates of the one-hour field.
Technical Details
Latest update: MRMS Version 12.2 (see this document for detailed v12.2 updates)
Accessible on: MRMS Development site (since it is only an input to the Multi-Sensor QPE product)
As explained in Zhang et al. (2011), the methodology is as follows:
- The Gauge Quality Control is first conducted to rid of any gauges that may cause erroneous estimates due to factors such as frozen precipitation, untimeliness of reporting, and anomalously high/low values.
- At each remaining rain gauge, find the difference between the co-located one-hour radar QPE and the gauge observation (i.e. the error at the rain gauge).
- We assume that the surrounding radar estimates are also biased (not just at the gauge), so we interpolate the estimated radar error at every radar pixel within a radius of influence using an inverse distance weighting (IDW) scheme. The IDW scheme considers: 1) the distance of the gauge from the radar pixel, and 2) the density of the gauge network.
- If the distance (d) between the rain gauge and pixel is within the range of influence (D), a weight (w) is calculated. The closer the proximity, the higher the weight. If d is greater than D, then the weight will equal zero.
 where
where 
eia is the estimated radar error at each ith pixel being interpolated.
wi,k is the weight assigned to the kth rain gauge and each ith pixel.
ek is the error at the kth rain gauge.
N is the number of matching gauge-radar pixel pairs.
di,kb is the distance between the gauge and pixel, b is a unitless exponent, and D is the radius of influence for each rain gauge (between 10 km and 260 km).
α is a multiplier based on the gauge density.
- ->The multiplier α is used to account for times when there is a sparse gauge network, which can affect the interpolation by assigning the entire radius of influence a constant error. α is calculated via a normal distribution where gauge influence decreases the farther from the pixel.
- ->For a radar pixel with many rain gauges within the radius of influence, α = 1 and the weighting scheme is the unaffected (i.e. distant gauges will be weighted less compared to closer gauges).
- ->For a radar pixel with few or only one gauge available for the interpolation, α < 1 and more weight to be given to the radar estimates, as opposed to the gauge network.
4. Certain parameters related to the weight (w) are determined for each analysis (i.e. every hour) to minimize the interpolation error of the radar-gauge bias. To do this, a cross-validation is completed that finds the minimized mean-squared error (MSE) of the radar-gauge difference.
5. Some gauges will inherently have anomalously high/low values that will affect the surrounding points during the interpolation.
- Therefore, after the bias correction, each gauge’s error estimate is compared with the error estimates of all radar pixels within 10 km of the gauge. If 75% or more of the pixel errors are greater than a given difference threshold, then the gauge is removed. Cross validation is rerun, and new parameters are set.
- This procedure is done two more times with smaller difference thresholds, and cross validation occurring between.
- The procedure is ended if more than 10% of the gauges are tossed, so to not eliminate a large number of gauges.
6. Once the bias is interpolated at every grid cell (ei), it is subtracted from the one-hour QPE – Radar Only product to create the final product.
References
Zhang, J., K. Howard, S. Vasiloff, C. Langston, et al., 2011: National Mosaic and multi-sensor QPE (NMQ) system: description, results and future plans. Bull. Amer. Met. Soc., 92, 1321-1338.
Zhang, J., K. Howard, S. Vasiloff, C. Langston, B. Kaney, Y. Qi, L. Tang, H. Grams, D. Kitzmiller, J. Levit, 2014: Initial Operating Capabilities of Quantitative Precipitation Estimation in the Multi-Radar Multi-Sensor System. 28th Conf. on Hydrology, Amer. Meteor. Soc.
Ryzhkov, A. V., M. Diederich, P. Zhang, and C. Simmer, 2014: Potential utilization of specific attenuation for rainfall estimation, mitigation of partial beam blockage, and radar networking. J. Atmos. Oceanic Technol., 31, 599–619, https://doi.org/10.1175/JTECH-D-13-00038.1.
Wang, Y., S. Cocks, L. Tang, A. Ryzhkov, P. Zhang, J. Zhang, and K. Howard, 2019: A prototype quantitative precipitation estimation algorithm for operational S-band polarimetric radar utilizing specific attenuation and specific differential phase. Part I: Algorithm description. J. Hydrometeor., 20, 985–997, https://doi.org/10.1175/JHM-D-18-0071.1.
Zhang, J., L. Tang, S. Cocks, P. Zhang, A. V. Ryzhkov, K. Howard, C. Langston and B. Kaney, 2020: A Dual Polarization Radar Synthetic QPE for Operations. J. Hydromet., 21, 2507-2521, https://doi.org/10.1175/JHM-D-19-0194.1.
Gauge Quality Control documentation
Other MRMS product documentation: Surface Precipitation Rate, QPE – Radar Only
Applications
Used as an input to hydrological models for river flow forecasts, as well as for validation of satellite QPE products. May be used by NWS WFOs in flood warning decision making.
Example Images
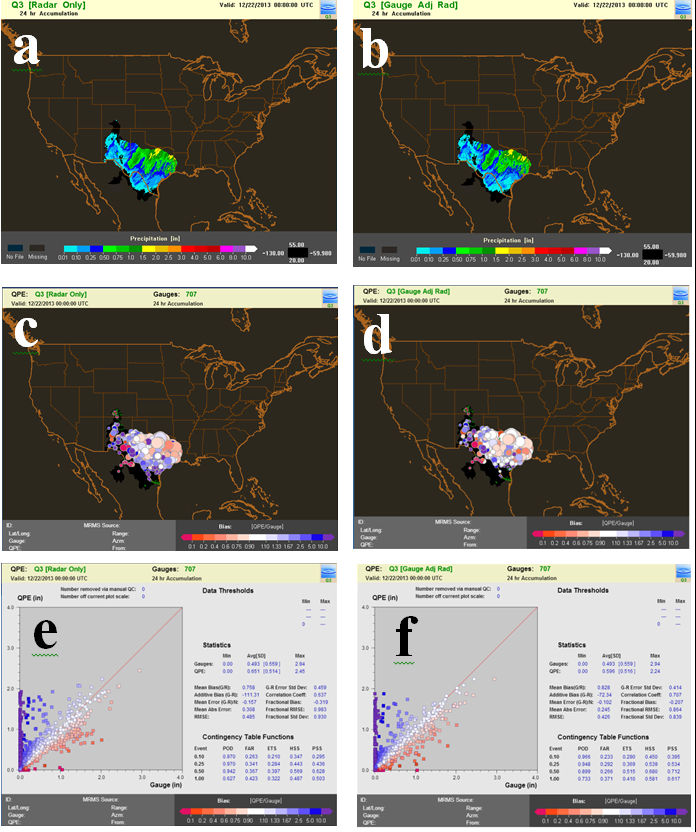
Figure 1. 24-hr QPE accumulation fields ending at 00Z on December 22, 2013 in the West Gulf RFC (a) before and (b) after gauge bias-correction. Bubble charts (c) and (d) show the bias ratios between the QPE - Radar Only and the gauge observations, where the size of the circles represents the gauge amount and the color shows the bias. Scatter plots (e) and (f) show the distributions of the QPE - Radar Only versus the gauge observations, with the skill scores (esp. RMSE and correlation coefficient) on the right of each plot.
(a)

(b)
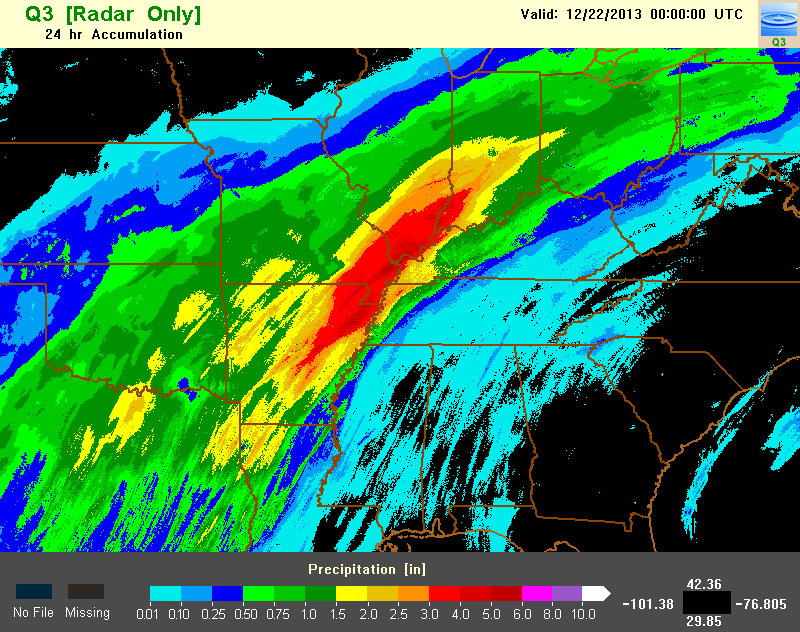
Figure 2. 24-hr QPE accumulation fields ending at 00Z on December 22, 2013 (a) before and (b) after gauge bias-correction.

Figure 3. 24-hr Gauge-Adjusted QPE accumulation field ending at 06Z on October 21, 2016.